Terwijl humanoïde robots in de wereld van vandaag gemeengoed worden, nemen viervoetige robothonden de operationele sector over voor verschillende bedrijven over de hele wereld. Toen we deze vraag zagen, hebben we verschillende bedrijven zoals Boston Dynamics en Xiaomi zien komen met geavanceerde robothonden die met gemak zware taken kunnen uitvoeren. Nu hebben ETH Zürich-onderzoekers samengewerkt met de populaire GPU-maker Nvidia om een geavanceerd algoritme te ontwikkelen – om echte robothonden te helpen lopen en rennen op stabiele en onstabiele terreinen.
Onderzoekers van ETH Zürich in Zwitserland werken samen met Nvidia om een hindernisbaan te creëren voor een virtueel leger robothonden. De virtuele simulatie wordt gebruikt om echte robotviervoeters te trainen om op complexe terreinen zoals hellingen, trappen en steile hellingen te lopen.
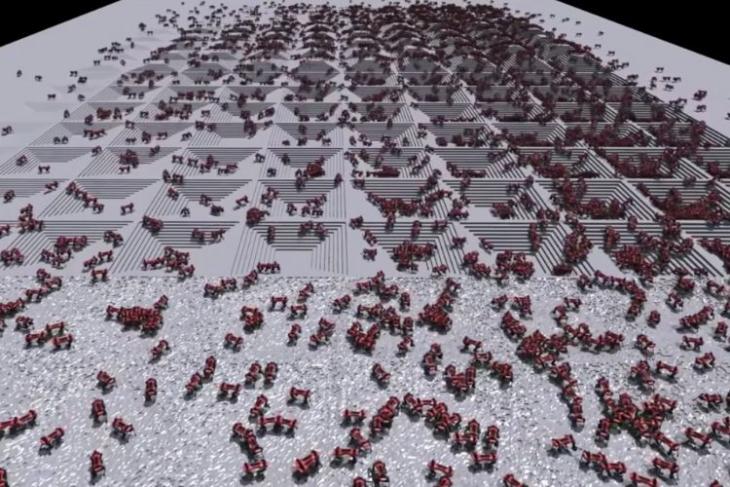
De vierpotige machines worden in de simulatie “ANYmals” genoemd en zien eruit als duizenden mieren die doelloos in een virtueel veld kronkelen. De onderzoekers gebruikten 4.000 virtuele robots om de simulatie te maken die u hieronder kunt bekijken.
De simulaties die zijn gemaakt om de robots te trainen, draaiden op gespecialiseerde op AI gebaseerde chipsets die zijn ontworpen door Nvidia. Als resultaat van deze geavanceerde chips, zeggen de onderzoekers dat ze de robots konden trainen in minder dan een honderdste van de tijd die normaal nodig is om ze te trainen met behulp van chips voor algemeen gebruik die in computers en servers worden gebruikt.
Hoewel de speciale chips van Nvidia redelijk goed zijn in het berekenen van grafische weergave en het uitvoeren van neurale netwerken, zijn ze niet erg goed in het simuleren van op fysica gebaseerde eigenschappen zoals klimmen en glijden. De onderzoekers kwamen echter met een aantal slimme op software gebaseerde oplossingen “om het goed te doen”, aldus Nvidia’s VP Simulation Technology Rev Lebaredian.
Na de creatie van de complexe simulatie met behulp van massaal parallel diep versterkend leren, gebruikten de onderzoekers het om de benen van echte robots te trainen. Hierdoor konden de robots binnen enkele minuten leren lopen op hellingen, trappen en andere complexe terreinen. Bovendien gaven de onderzoekers elke keer dat een robothond leerde om uitdagend terrein aan te pakken, een moeilijker terreinuitdaging om het besturingsalgoritme geavanceerder te maken.
Dus de ETH-onderzoekers en Nvidia denken dat de “ANYmals” -simulatie een geweldig hulpmiddel kan zijn om echte robothonden in minder tijd te trainen met behulp van versterkingsleren. Je kunt het officiële onderzoekspaper erover bekijken via de bijbehorende link om meer te weten te komen over het complexe algoritme en de virtuele hindernisbaan.