
Een dataset die werd gebruikt om crashrisicokaarten te maken, besloeg 7.500 vierkante kilometer van Los Angeles, New York City, Chicago en Boston. Van de vier steden was LA de meest onveilige, omdat het de hoogste crashdichtheid had, gevolgd door New York City, Chicago en Boston. Krediet: MIT CSAIL
De wereld van vandaag is één groot doolhof, verbonden door lagen beton en asfalt die ons de luxe bieden van navigatie per voertuig. Voor veel van onze weggerelateerde ontwikkelingen – GPS stelt ons in staat minder neuronen af te vuren dankzij kaart-apps, camera’s waarschuwen ons voor mogelijk kostbare krassen en krassen, en elektrische autonome auto’s hebben lagere brandstofkosten – onze veiligheidsmaatregelen zijn nog niet helemaal ingehaald. We vertrouwen nog steeds op een vast dieet van verkeerslichten, vertrouwen en het staal om ons heen om veilig van punt A naar punt B te komen.
Om de onzekerheid die inherent is aan crashes voor te zijn, hebben wetenschappers van MIT’s Computer Science and Artificial Intelligence Laboratory (CSAIL) en het Qatar Center for Artificial Intelligence een diepgaand leermodel ontwikkeld dat crashrisicokaarten met zeer hoge resolutie voorspelt. Gevoed op een combinatie van historische ongevalsgegevens, wegenkaarten, satellietbeelden en GPS-sporen, beschrijven de risicokaarten het verwachte aantal ongevallen over een bepaalde periode in de toekomst, om risicogebieden te identificeren en toekomstige ongevallen te voorspellen.
Meestal worden dit soort risicokaarten vastgelegd met veel lagere resoluties die rond honderden meters zweven, wat betekent dat cruciale details worden verdoezeld omdat de wegen samen vervagen. Deze kaarten zijn echter rastercellen van 5 x 5 meter, en de hogere resolutie zorgt voor hernieuwde duidelijkheid: de wetenschappers ontdekten dat een snelwegweg bijvoorbeeld een hoger risico heeft dan nabijgelegen woonwegen, en opritten die samenkomen en de snelweg verlaten, hebben een nog hoger risico dan andere wegen.
“Door de onderliggende risicoverdeling vast te leggen die de waarschijnlijkheid van toekomstige ongevallen op alle plaatsen bepaalt, en zonder historische gegevens, kunnen we veiligere routes vinden, autoverzekeringsmaatschappijen in staat stellen om aangepaste verzekeringsplannen te bieden op basis van rijtrajecten van klanten, stadsplanners helpen bij het ontwerpen veiliger wegen en zelfs toekomstige ongevallen voorspellen”, zegt MIT CSAIL Ph.D. student Songtao He, een hoofdauteur van een nieuw artikel over het onderzoek.
Hoewel auto-ongelukken schaars zijn, kosten ze ongeveer 3 procent van het BBP van de wereld en zijn ze de belangrijkste doodsoorzaak bij kinderen en jonge volwassenen. Deze schaarsheid maakt het afleiden van kaarten met zo’n hoge resolutie een lastige taak. Crashes op dit niveau zijn dun verspreid – de gemiddelde jaarlijkse kans op een crash in een 5×5 rastercel is ongeveer één op de 1.000 – en ze gebeuren zelden twee keer op dezelfde locatie. Eerdere pogingen om het risico op ongevallen te voorspellen waren grotendeels ‘historisch’, aangezien een gebied alleen als risicovol zou worden beschouwd als er eerder een ongeval in de buurt was geweest.
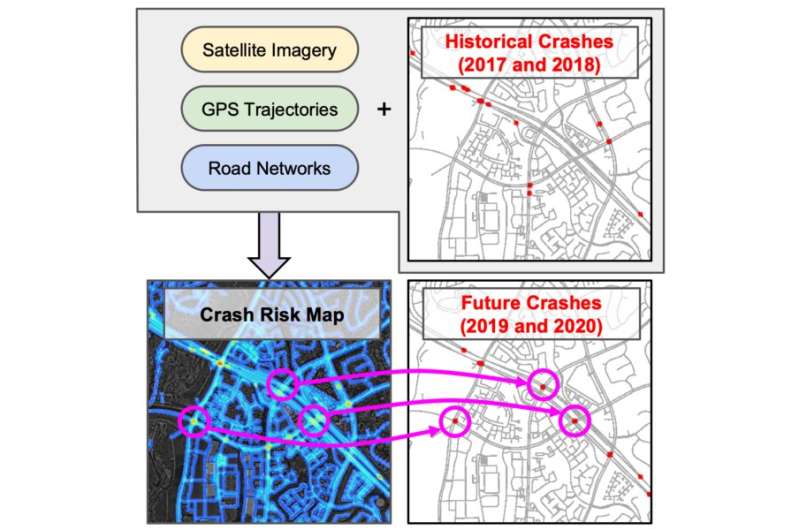
Om het model te evalueren, gebruikten de wetenschappers crashes en gegevens uit 2017 en 2018 en testten ze de prestaties bij het voorspellen van crashes in 2019 en 2020. Veel locaties werden geïdentificeerd als risicovol, hoewel ze geen geregistreerde crashes hadden, en ervoeren ook crashes tijdens de vervolgjaren. Krediet: MIT CSAIL
De aanpak van het team werpt een breder netwerk op om kritieke gegevens vast te leggen. Het identificeert risicovolle locaties met behulp van GPS-trajectpatronen, die informatie geven over de dichtheid, snelheid en richting van het verkeer, en satellietbeelden die wegstructuren beschrijven, zoals het aantal rijstroken, of er een berm is, of dat er een groot aantal is van voetgangers. Zelfs als een gebied met een hoog risico geen geregistreerde ongevallen heeft, kan het nog steeds worden geïdentificeerd als een gebied met een hoog risico, alleen op basis van de verkeerspatronen en topologie.
Om het model te evalueren, gebruikten de wetenschappers crashes en gegevens uit 2017 en 2018 en testten ze de prestaties bij het voorspellen van crashes in 2019 en 2020. Veel locaties werden geïdentificeerd als risicovol, hoewel ze geen geregistreerde crashes hadden, en ervoeren ook crashes tijdens de vervolgjaren.
“Ons model kan generaliseren van de ene stad naar de andere door meerdere aanwijzingen uit schijnbaar niet-gerelateerde gegevensbronnen te combineren. Dit is een stap in de richting van algemene AI, omdat ons model crashkaarten in onbekende gebieden kan voorspellen”, zegt Amin Sadeghi, een hoofdwetenschapper bij Qatar Computing Research Institute (QCRI) en een auteur op het papier. “Het model kan worden gebruikt om een bruikbare crashkaart af te leiden, zelfs bij afwezigheid van historische crashgegevens, wat zich zou kunnen vertalen in een positief gebruik voor stadsplanning en beleidsvorming door denkbeeldige scenario’s te vergelijken.”
De dataset besloeg 7.500 vierkante kilometer van Los Angeles, New York City, Chicago en Boston. Van de vier steden was LA de meest onveilige, omdat het de hoogste crashdichtheid had, gevolgd door New York City, Chicago en Boston.
“Als mensen de risicokaart kunnen gebruiken om wegsegmenten met een potentieel hoog risico te identificeren, kunnen ze van tevoren actie ondernemen om het risico van reizen die ze maken te verminderen. Apps zoals Waze en Apple Maps hebben hulpprogramma’s voor incidentfuncties, maar we proberen vóór de crashes – voordat ze gebeuren”, zegt Hij.
Het afleiden van risicokaarten voor verkeersongevallen met hoge resolutie op basis van satellietbeelden en GPS-trajecten. openaccess.thecvf.com/content/ … _ICCV_2021_paper.pdf
Geleverd door het Massachusetts Institute of Technology