 tot niveau 5 (een voertuig dat zelfstandig alles kan wat een menselijke bestuurder kan). </p>
<p>De meeste geautomatiseerde rijoplossingen die tegenwoordig op de markt verkrijgbaar zijn, vereisen menselijke tussenkomst. Dit plaatst ze op niveau 1 (rijhulpsystemen, zoals een auto op zijn rijstrook houden of zijn snelheid beheren) of niveau 2 (gedeeltelijke automatisering, zoals sturen en snelheidsregeling).</p>
<p>Deze mogelijkheden zijn bedoeld voor gebruik met een volledig <a rel=\"nofollow noopener noreferrer\" target=\"_blank\" href=\"https://www.news.com.au/technology/innovation/elon-musk-responds-after-investigators-announce-probe-into-fatal-tesla-crash/news-story/3b542905eb150c69453f58eb792fe2fe\">attente chauffeur</a> bereid om op elk moment de touwtjes in handen te nemen. </p>
<p><a rel=\"nofollow noopener noreferrer\" target=\"_blank\" href=\"https://techcrunch.com/2020/11/11/honda-to-mass-produce-level-3-autonomous-cars-by-march/\">Niveau 3</a> voertuigen hebben meer autonomie en kunnen sommige beslissingen zelf nemen, maar de bestuurder moet nog steeds alert blijven en de controle overnemen als het systeem niet kan rijden.</p>
<p>In de afgelopen jaren zijn verschillende dodelijke ongevallen betrokken <a rel=\"nofollow noopener noreferrer\" target=\"_blank\" href=\"https://www.theguardian.com/technology/2020/feb/25/tesla-driver-autopilot-crash\">level 2</a> en <a rel=\"nofollow noopener noreferrer\" target=\"_blank\" href=\"https://www.swinburne.edu.au/news/2018/05/level-3-autonomous-technology-the-deadliest-stage-in-self-driving-development/\">niveau 3</a> voertuigen hebben plaatsgevonden. Deze crashes werden grotendeels toegeschreven aan menselijke fouten, en aan het verwarren van deze automatiseringsniveaus voor volledig zelfrijdend vermogen. </p>
<p> <!-- Google middle Adsense block --></p>
<p>Voertuigfabrikanten en toezichthouders zijn geweest <a rel=\"nofollow noopener noreferrer\" target=\"_blank\" href=\"https://www.reuters.com/article/uk-tesla-crash-idINKBN20J2II\">bekritiseerd</a> omdat ze niet genoeg hebben gedaan om deze systemen weerbaarder te maken tegen misbruik door onoplettende chauffeurs.</p>
<div class=\"article-gallery lightGallery\">
<div data-thumb=\"https://scx1.b-cdn.net/csz/news/tmb/2021/1-selfdrivingc.jpg\" data-src=\"https://scx2.b-cdn.net/gfx/news/2021/1-selfdrivingc.jpg\" data-sub-html=\"The standard levels of vehicle automation. Credit: Shutterstock\">
<figure class=\"article-img text-center\"><img decoding=\"async\" src=\"https://scx1.b-cdn.net/csz/news/800a/2021/1-selfdrivingc.jpg\" alt=")
De standaardniveaus van voertuigautomatisering. Krediet: Shutterstock
De weg naar hogere automatiseringsniveaus
Voor hogere automatiseringsniveaus hoeft een menselijke bestuurder niet noodzakelijkerwijs betrokken te zijn bij de rijtaak. De bestuurder zou in feite worden vervangen door de AI-zelfrijdende software.
Niveau 4 is een “zelfrijdend” voertuig met een begrensde reikwijdte van waar en wanneer het zal rijden. Het beste voorbeeld van een voertuig van niveau 4 is dat van Google Waymo robotaxi project. Andere bedrijven boeken ook aanzienlijke vooruitgang bij de ontwikkeling van voertuigen van niveau 4, maar deze voertuigen zijn niet commercieel verkrijgbaar voor het publiek.
Niveau 5 vertegenwoordigt een echt autonoom voertuig dat overal en altijd kan rijden, vergelijkbaar met wat een menselijke bestuurder kan doen. De overgang van niveau 4 naar niveau 5Het is echter ordes van grootte moeilijker dan overgangen tussen andere niveaus, en het kan jaren duren voordat dit bereikt is.
Hoewel de technologieën die nodig zijn om hogere automatiseringsniveaus mogelijk te maken, snel vorderen, blijft het een grote uitdaging om een voertuig te produceren dat een reis veilig en legaal kan afleggen zonder menselijke tussenkomst.
Drie belangrijke belemmeringen moeten worden overwonnen voordat ze veilig op de markt kunnen worden geïntroduceerd: technologie, regelgeving en publieke acceptatie.
Machine learning en zelfrijdende software
De zelfrijdende software is een belangrijk onderscheidend kenmerk van sterk geautomatiseerde voertuigen. De software is gebaseerd op algoritmen voor machine learning en diepgaande neurale netwerken waaronder miljoenen virtuele neuronen die het menselijk brein nabootsen.
De neurale netten bevatten geen expliciete “als X gebeurt, doe dan Y” -programmering. In plaats daarvan zijn ze getraind om objecten te herkennen en te classificeren aan de hand van voorbeelden van miljoenen video’s en afbeeldingen uit reële rijomstandigheden.
Hoe diverser en representatiever de gegevens, hoe beter ze worden in het herkennen van en reageren op verschillende situaties. Het trainen van neurale netten is zoiets als het vasthouden van de hand van een kind bij het oversteken van de weg en het leren leren door constante ervaring, replicatie en geduld.
Hoewel deze algoritmen objecten zeer nauwkeurig kunnen detecteren en classificeren, kunnen ze de ingewikkelde complexiteit van autorijden nog steeds niet nabootsen. Autonome voertuigen moeten niet alleen mensen en andere objecten detecteren en herkennen, maar moeten ook communiceren met, begrijpen en reageren op hoe deze dingen zich gedragen.
Ze moeten ook weten wat ze moeten doen in onbekende omstandigheden. Zonder een grote reeks voorbeelden voor alle mogelijke rijscenario’s, zal de taak om het onverwachte te beheersen relatief resistent zijn tegen diepgaand leren en trainen.
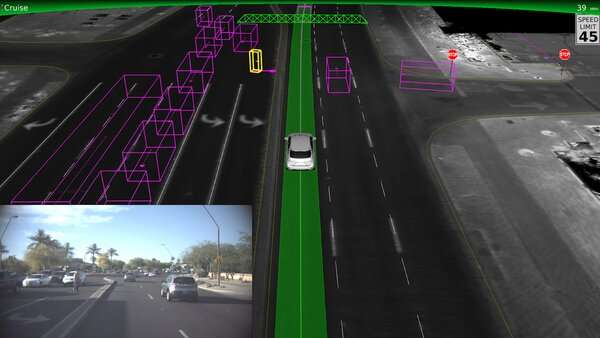
Hoe een zelfrijdende auto de wereld ziet. Krediet: Waymo
Regelgeving
Beleidsmakers en toezichthouders over de hele wereld hebben moeite om gelijke tred te houden. Tegenwoordig blijft de industrie grotendeels zelfregulerend, met name om te bepalen of de technologie veilig genoeg is voor open wegen. Regelgevende instanties hebben grotendeels nagelaten criteria te verstrekken voor het maken van dergelijke beslissingen.
Hoewel het nodig is om de prestaties van zelfrijdende software onder reële omstandigheden te testen, mag dit alleen gebeuren na uitgebreide veiligheidstesten en evaluatie. Regelgevers moeten een reeks standaardtests bedenken en bedrijven ertoe aanzetten hun algoritmen te benchmarken op basis van standaardgegevenssets voordat hun voertuigen op de openbare weg worden toegelaten.
In Australië ondersteunen de huidige wetten de veilige commerciële inzet en exploitatie van zelfrijdende voertuigen niet. De Nationale Transportcommissie leidt de inspanningen om nationaal consistente hervormingen te ontwikkelen die innovatie en veiligheid ondersteunen om Australiërs toegang te geven tot de voordelen van de technologie.
Er is een geleidelijke benadering van certificering nodig, waarbij een zelfrijdend systeem eerst kan worden geëvalueerd in simulaties en vervolgens in gecontroleerde real-world omgevingen. Zodra de voertuigen specifieke benchmarktests doorstaan, kunnen de toezichthouders ze op open wegen toelaten.
Publieke acceptatie
De openbaar moeten worden betrokken bij beslissingen over de inzet en adoptie van zelfrijdende voertuigen. Er is een reëel risico dat het vertrouwen van het publiek wordt ondermijnd als zelfrijdende technologieën niet worden gereguleerd om de openbare veiligheid te waarborgen. Een gebrek aan vertrouwen zal niet alleen gevolgen hebben voor degenen die de technologie willen gebruiken, maar ook voor degenen die de weg met hen delen.
Ten slotte moet dit incident dienen als katalysator om regelgevers en de industrie ertoe te brengen een sterke en robuuste veiligheidscultuur te creëren die innovaties in zelfrijdende technologieën leidt.
Zonder dit zouden autonome voertuigen nergens zo snel naartoe gaan.
Geleverd door The Conversation