
Een ontwikkeling uit Stiermarken van TU Graz, JOANNEUM RESEARCH, AVL en Fraunhofer Austria zet echte routes tot in detail over in de rijsimulator. Krediet: TU Graz
Rijsimulatortests zijn populair – om begrijpelijke redenen: elk scenario kan met één druk op de knop worden gesimuleerd. Ze zijn onafhankelijk van tijd en weersomstandigheden en zonder enig veiligheidsrisico voor voertuig, mens of milieu. Bovendien is een uur in de rijsimulator goedkoper en vergt minder organisatie dan een echte rijles op een testbaan.
“Op het gebied van sterk geautomatiseerd rijden worden rijsimulatorstudies echter vaak in twijfel getrokken vanwege het gebrek aan realisme. Bovendien waren er tot voor kort geen gestandaardiseerde testprocedures die hadden kunnen worden gebruikt om complexe taken zoals de onderlinge interactie tussen mens en systeem (overdrachtsprocedures)”, zegt Arno Eichberger, hoofd van het onderzoeksgebied “Automated Driving & Driver Assistance Systems” aan het Institute of Automotive Engineering aan de Technische Universiteit van Graz (TU Graz).
Nieuwe regelgeving als eerste vonk
Onlangs, omdat de eerste wereldwijde regelgeving voor Automated Lane Keeping Systems (ALKS) sinds begin 2021 van kracht is. Deze wet lost het dilemma van de goedkeuring op de weg op, zoals Eichberger uitlegt dat “tot nu toe de regelgevende instanties niet wisten hoe ze moesten testen en autonoom rijdende systemen goedkeuren. De voertuigfabrikanten wisten op hun beurt niet aan welke eisen de systemen moesten voldoen om goedgekeurd te worden.” In de regelgeving zijn nu voor het eerst de goedkeuringscriteria voor sterk geautomatiseerde systemen (autonoom rijden niveau 3) tot een maximumsnelheid van 60 km/u vastgelegd op basis van een fileassistent. Wanneer de assistent wordt geactiveerd, wordt de verantwoordelijkheid voor de besturing overgedragen aan de machine. De chauffeur mag zijn handen van het stuur halen, maar moet bij een storing direct weer overnemen. Het systeem moet herkennen dat de persoon achter het stuur hiertoe in staat is.
Op basis van deze verordening hebben Eichberger en zijn onderzoekspartners van Fraunhofer Austria, AVL en JOANNEUM RESEARCH de afgelopen maanden een efficiënte methode ontwikkeld waarmee de gereedheid om de controle over te nemen veilig, efficiënt en in hoge mate realistisch kan worden getest in een rijsimulator en de resultaten kunnen worden gebruikt voor de certificering van ALKS-systemen.

Tijdens testritten creëren onderzoeksvoertuigen met zeer nauwkeurige landmeetsystemen de virtuele testomgeving. Credit: JJ Kucek – TU Graz
Identieke machineperceptie van de omgeving
Er waren processen nodig om de validiteit van de rijsimulatie aan de hand van de proefrit te bewijzen. De basis hiervoor was een directe vergelijking: rijsimulatie en echt rijden (de AVL-testbaan in Gratkorn, Stiermarken, diende als testlocatie) moesten zo goed mogelijk op elkaar aansluiten. Hier vormde de machinale perceptie van de omgeving een uitdaging. Figuurlijk gesproken zijn machineperceptie de zintuigen van het voertuig. Het heeft de taak om de omgeving van het voertuig nauwkeurig vast te leggen – van het landschap en omgevingsobjecten tot andere weggebruikers – zodat het rijhulpsysteem adequaat kan reageren op de situatie. Eichberger: “Als dit hetzelfde wil lopen als in de werkelijkheid, moeten de omgevingen in de simulatie tot op de centimeter nauwkeurig overeenkomen met de echte omgeving.”
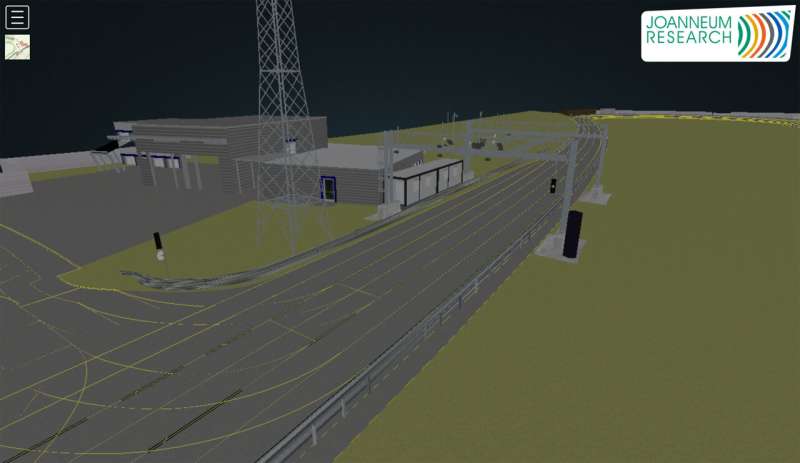
Hoe het uiteindelijke 3D-model van een testbaan eruitziet, afgeleid van de UHD-kaarten. Krediet: Joanneum Research
De rijroutes overbrengen naar de rijsimulator
zijn nauwkeurigheid wordt bereikt met behulp van zogenaamde “Ultra High Definition Maps” (UHDmaps) van JOANNEUM RESEARCH (JR), een van ’s werelds toonaangevende onderzoeksinstellingen op het gebied van digitale tweelingen. “Voor het meten van de testomgevingen gebruiken we een mobile mapping systeem. Ten slotte ontstaat uit de meetgegevens een naadloze 3D-kaart met een extreem hoog detailniveau. Naast verkeersinfrastructuurobjecten zoals verkeersborden, rijbaanmarkeringen en vangrails, vegetatie en gebouwen zijn ook op deze kaart weergegeven”, zegt Patrick Luley, hoofd van het onderzoekslaboratorium voor sterk geautomatiseerd rijden bij het DIGITAL Institute. Hoewel vergelijkbare nauwkeurigheid kan worden bereikt met handmatige 3D-modellering, is het geautomatiseerde UHD-mappingproces van JR vele malen goedkoper en sneller.

De rijsimulator is een in-house ontwikkeling met een focus op het ontwikkelen en testen van mens-machine-interfaces in het voertuig. Het vormt een belangrijke basis in het ontwikkelingsproces van rijhulpsystemen en geautomatiseerde rijfuncties. Credit: Lunghammer – TU Graz
De 3D-omgeving met hoge resolutie wordt uiteindelijk overgebracht naar de rijsimulator. Hier komt het team van Fraunhofer Austria om de hoek kijken. Volker Settgast van de business unit Visual Computing zegt dat ze “de gegevens zo voorbereiden dat de 3D-omgeving met hoge snelheid kan worden weergegeven.” Zelfs reflecterende en transparante oppervlakken of bomen en struiken die door de wind worden geblazen, kunnen natuurlijk worden waargenomen. Afhankelijk van het testscenario kunnen dan extra voertuigen of zelfs mensen aan de virtuele omgeving worden toegevoegd.
De validatie wordt uiteindelijk geverifieerd met behulp van vergelijkende runs op de echte route. “Met onze methode is het voor autofabrikanten mogelijk om op het echte circuit en in de rijsimulator eenvoudig een bepaalde steekproef te vergelijken en te valideren. Dit betekent dat de test uiteindelijk kan worden overgedragen van het echte circuit naar de rijsimulator”, zegt Eichberger . De TU Graz-onderzoeker en zijn team werken nu de komende maanden aan het opzetten van virtuele goedkeuringstesten.
Geleverd door de Technische Universiteit van Graz